Thunderbolts
FTC #28490
Igniting engines…
FTC DECODE — 2025–2026 Season · Thessaloniki, Greece
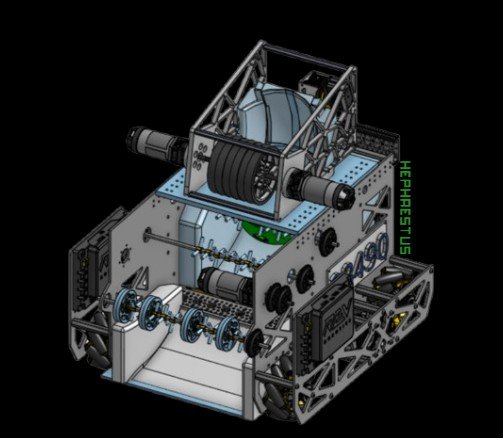
Custom-shaped base with Mecanum Wheel System for omnidirectional movement. Built with aluminum, PLA, PETG, and TPU materials.
Chain-driven system with a 20:1 ratio 500 RPM motor. Selected for direct angular velocity transfer and rapid specimen capture.
Single Hooded Flywheel — chosen for low power consumption, lightweight design, and high repeatable accuracy. Zero vibration stability.
3-Stage Cascade Lift for rapid elevation with smooth extension. Optimized for quick cycle times during EndGame.
Double claw mechanism with rubber grips and a high-torque servo for secure and reliable sample handling.
Two dead wheel odometry combined with a GoBilda PinPoint sensor. Navigation uses Pure Pursuit (Circle Line Intersection) algorithm.
Shoot as many artifacts as possible into goals, ignoring patterns to save time. Focus on maximizing scoring efficiency with custom task scheduler.
Focus on completing the Goal RP with optimized cycles, minimal unnecessary movement, and emphasis on reliability over speed.
Pure Pursuit algorithm (Circle Line Intersection) for smooth autonomous paths. Custom Task Scheduler with Single-trigger, Continuous, and Decay task types.